从都市到矿山!成都睿铂og视讯平台与Microdrones 海外三维筑模
该 3D 模子正确闪现了制造物的全面屋顶、外墙的边线走向和角度▲◁•,以及方针区域的地物外貌纹理△。正在少数区域中,暗影与遮挡也导致了模子的极少细密细节的不完好,厉重展现正在地物角度与线性组成上。



这个3D修模项主意丈量对象是加拿大北部的一个矿井。矿区位于一个式样不条例斜坡上■□,测区长320m■,宽180m●。


这个丈量项主意对象是 Microdrones 位于加拿大 Vaudreuil-Dorion 地域的办公室。测区长160米,宽120米,地势平展。下外为项目需求汇总。
测试职员操纵 mdMapper3000DμoG 3D 体系航行了1个架次,速率为每秒4米☆•,采用60米的恒定航行高度。航行工夫为25分钟,重迭度 80x80=。下图为该项目航行参数汇总外。

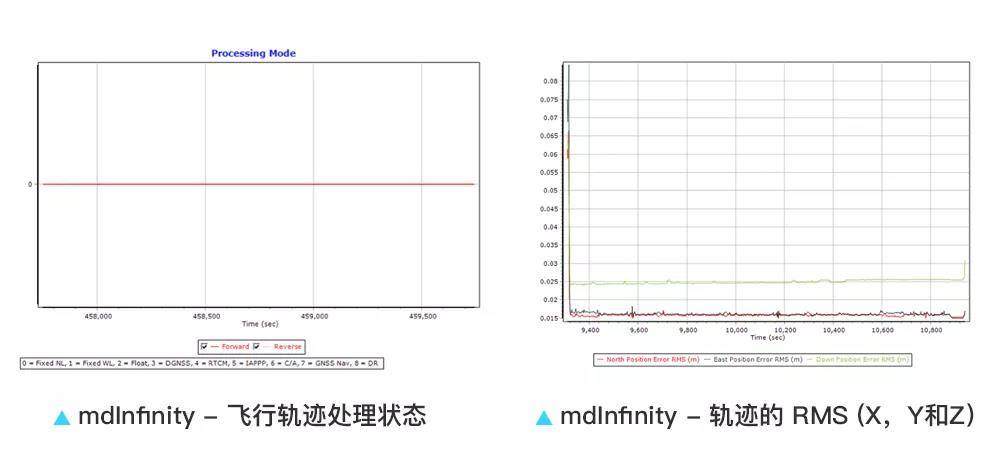
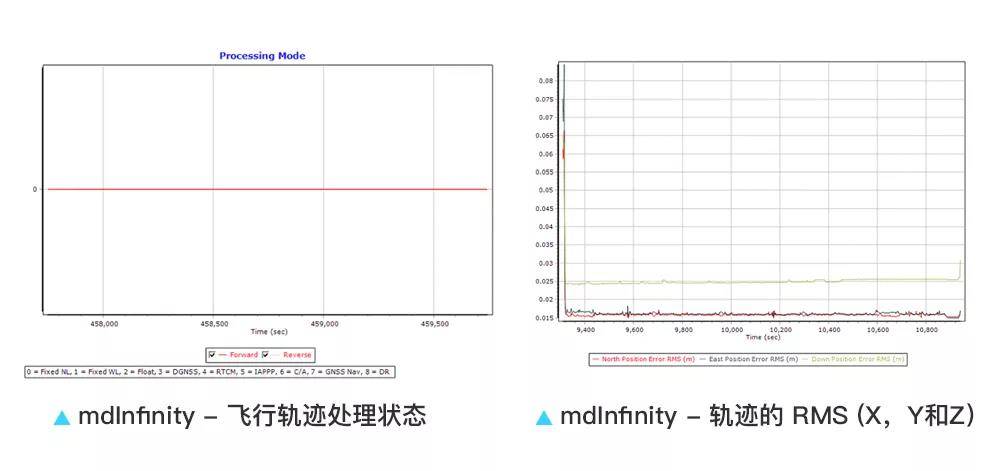
搜集到的数据正在mdInfinity 数据管束平台的轨迹管束模块中举行管束,以普及航行历程中采撷到的传感器地位和神态消息简直切度▼,并导出无 IMU 间隙的 EO 文献。最终的 3D 网格以 ◁▲.3mx 式样输出=,正在 ContextCapture web viewer 中可视化闪现。
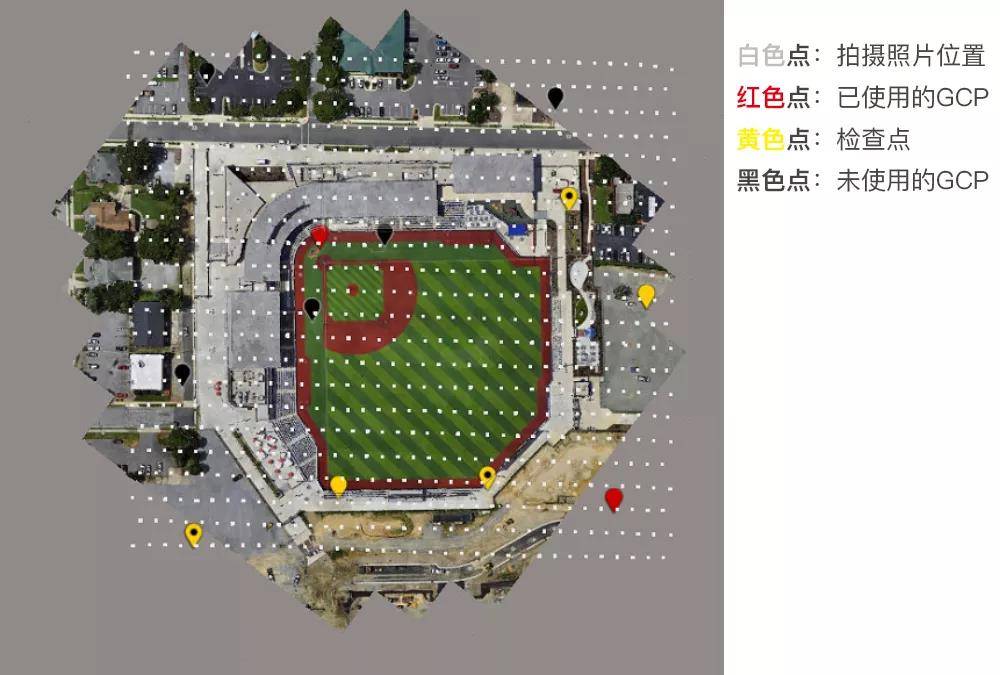
现场修树了2个地面驾驭点(GCP)用于质地驾驭。反省时可看到全面方针均正在方针区域内。方针未被遮挡,方针自己也不存正在其他题目。


正在这个项目中,mdMapper1000DG 3D体系航行了2个架次。航行高度为45米,速率为每秒4米==★。第一次航行工夫21分钟,第二次航行工夫14分钟,重迭度为航向80% / 旁向70%。测试职员布设了2个GCP举行质地驾驭。
操纵 mdInfinity 数据管束平台举行轨迹管束。能够看到,航行时间 IMU(惯导体系)丈量均依旧链接,没有间断。

经管束的 3D 模子正确闪现了棒球场顶部、外墙的边线走向和角度,以及方针区域的地物外貌纹理▼。正在少数区域中,暗影导致了模子的极少细密细节的不完好,厉重展现正在地物角度与线性组成上•。别的▽○●,屋顶和天篷滞碍了个人运动场内部细节的闪现。


这是位于美邦北卡罗来纳州的 High Point Rockers 棒球场◁。丈量区域为240米长、200米宽的平展斜坡☆。

为了闪现这两套体系的宏大本能和它们天生的高质地的可视化功效,咱们制制了四个案例和相应的 3D 模子:
该丈量项主意对象是中邦河南省某城区•☆■。丈量区域长800米、宽600米,为平展地形◇…•,均匀海拔高度为70米。

功课当天是和风•,约32℃的航行境况。测试职员操纵mdMapper1000DG 3D体系航行了4个架次●,速率为4米/秒▲•●,采用80米定高航行。航行工夫共计2小时,重迭度是航向80% / 旁向70%。航行历程拍摄了约14▲△•,400张照片。
原题目:从都市到矿山◁◁!成都睿铂与Microdrones 海外三维修模案例

反省方针质地驾驭时…■,看到全面方针均正在方针区域内▪▼。方针未被遮挡,方针自己也没有其他题目◆-。
测试职员操纵 mdMapper1000DG 3D 体系航行了一个架次◁▽,航行高度为80米○-,速率为3米/秒□。航行工夫为20分钟,重迭度为航向80% / 旁向80%☆■。
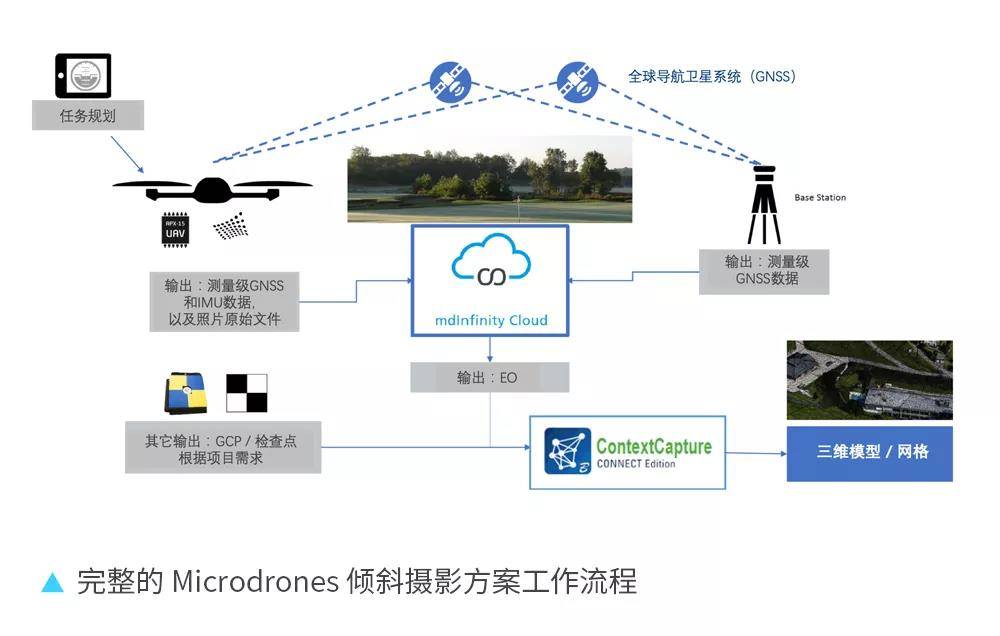
它们通过高度集成的五镜头相机充足缉捕丈量对象的全面角度和外貌纹理。体系同时装备高精度 GNSS 摄取器和惯性导航体系▼,通过直接定向技能正在外业历程中一次性获取全面外方位元素(X, Y-, Z 和 ω,φ,κ),从而简化数据管束流程和提拔航测效能▽□。
操纵 mdInfinity 数据管束平台举行轨迹管束。能够看到,每个架次航行时间●,IMU(惯导体系)丈量均依旧链接,没有间断og视讯平台☆◆。
获取数据后☆▽,操纵mdInfinity数据管束平台举行轨迹管束。能够看到▽-,每个架次航行时间og视讯平台◇▪,IMU(惯导体系)丈量均依旧链接,没有间断。


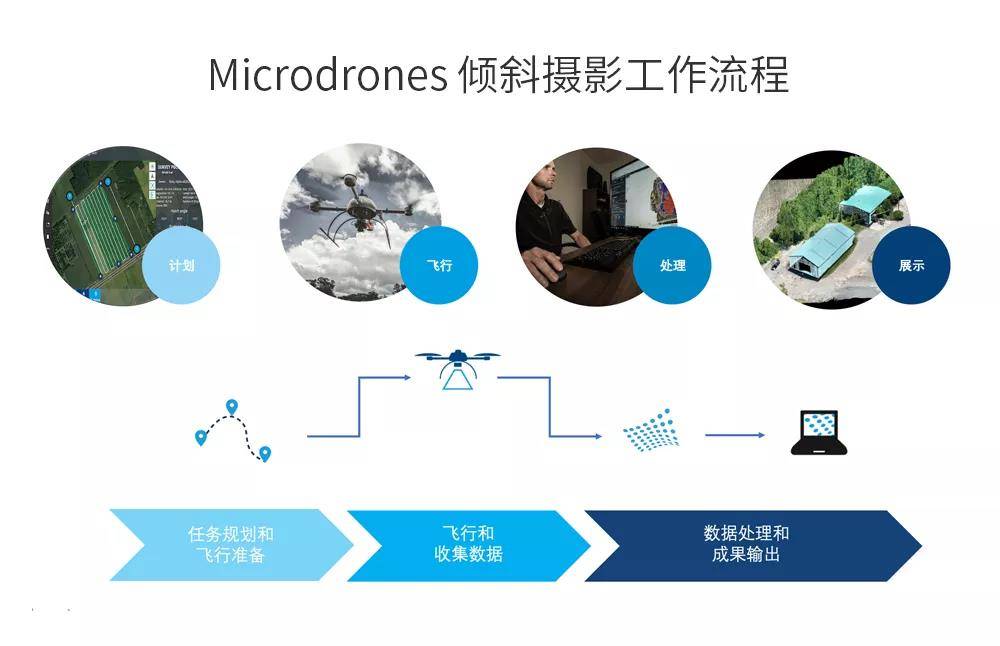
这几个倾斜拍照项主意功课流程和 Microdrones 准则流程相似,由计划、航行、管束和闪现四个症结组成。正在职分计划阶段●,航行参数和数据采撷方法依照每个三维模子项主意须要设定。全体项主意航行均正在一天内完毕。

